Technical Brief
Tensilica ConnX B20 DSP IP: Radar and Lidar
Overview
Overview
Picture this: you are crossing a street on foot, and a car—without a driver, no less—stops automatically to allow you to cross. You can bet that car sensors—cameras, radar, and lidar—have allowed this technological miracle to come to pass.
To be honest, this is not that surprising nowadays. It is impossible to live in this connected world without being recorded or sensed by cameras, radar, and lidar. From proximity detectors to security cameras to being “sensed” by assisted-driving sensors, we are becoming more and more connected by a myriad of applications. The big difference between cameras and radar/lidar is that cameras require what they see to be made visible by some other light source, whereas radar and lidar actively “light up” what they can see invisibly by emitting beams that bounce off object(s). Consumer and industrial radar and lidar are used for gesture recognition, occupancy detection, and obstacle avoidance, and are being deployed for ease of control, energy savings, and higher safety applications as radar and lidar technologies mature.
The biggest vertical for these sensing technologies is in the automotive market. Autonomous driving and driver assistance technologies are driving the development of these technologies, and higher resolution “imaging” radar is the new target—resulting in the need for more antennas and more data processing.
More functions than ever are being designed into DSPs, such as the Cadence Tensilica ConnX B20 DSP, for adding flexibility as the sensing algorithms improve more quickly than new chips can be built. With better, more efficient hardware capabilities to execute the most advanced algorithms, these processors open up a much more enhanced and lower power sensing solution. By using this advanced technology, more functions can be processed in and around your car, not to mention in other applications.
Sensors
There are ten criteria that can used to measure sensor capabilities for automotive applications:
-
 Detect proximity
Detect proximity - Operate in a reasonable distance/range
- Provide high resolution
- Work in low-light conditions
- Work in bright light
- Work in adverse weather conditions
- Provide color and contrast
- Detect the speed of an identified object
- Be compact in size
- Have a reasonable cost
A spider graph works well to visualize the efficacy of each sensor methodology.
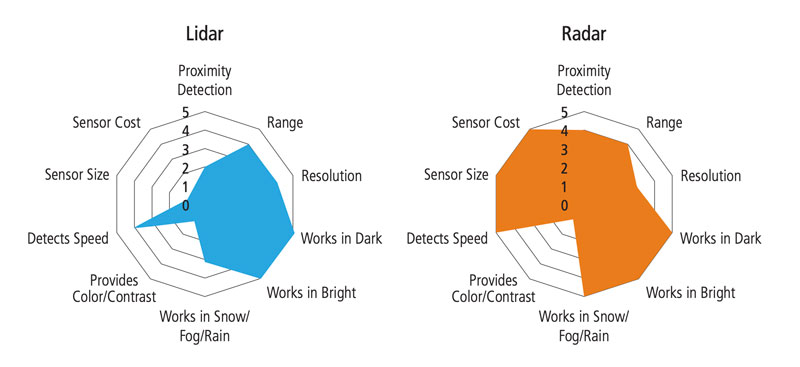
Lidar in automobiles currently consists of a single expensive, rotating sensor affixed to the top of the car. Moving forward, the trends in lidar are to become smaller and fixed in place (becoming “solid state”), so they will become inexpensive enough for a single automobile to have multiple lidar sensors, and for all cars to contain at least one. The implication of this is the need to change the focus from developing just for high performance to developing for high performance and low power. As shown in the graph, the lowest scores have to do with cost and size, and that is precisely where the direction of development is going in lidar technology.
The resolution offered by current radar systems is less than stellar for high-speed autonomous driving. As development of this technology progresses, the automotive market demands significantly higher resolution imaging radar and the additional processing and memory that goes along with it. With more antennas come higher resolution beamforming, and more data points to process. The implication of this increase is the need to process higher accuracy calculations and more of them.
Next-Generation Sensor Technology
Typically, general-purpose CPUs are not ideal for special-function processing like radar or lidar because they are inefficient at processing these algorithms and consequently consume too much power. That’s why specialized processors have been in development for years. Specialized DSPs like the Tensilica ConnX DSPs can process sensor data in highly parallel operations, matched to the data widths needed, that are much more efficient than a CPU and result in lower cost/size/power solutions.
Some of the things you should look for when evaluating a new processor—particularly DSPs that you can add to your systemon-chip (SoC) design—include:
Performance: The DSP must finish its work in as few cycles as possible and at a faster clock speed.
Memory: The DSP must be designed to reach higher clock speeds with larger memories.
Low Energy: The DSP must finish the same work in fewer cycles and be power efficient so that many can be deployed if needed and not cause heating issues in the system.
Low Cost: The DSP must be as small as possible, resulting in a lower cost.
The Tensilica ConnX B20 DSP meets all these needs for radar and lidar technology, with the addition of an advanced optimizing compiler, optimized math libraries and application examples, and an Eclipse IDE for full development, with debug and profiling on an ISS or JTAG target.
Even in the world of sensor processing, there’s no one-size-fits-all solution. Look for a family of compatible processors so you have the flexibility to pick just the features you need for your application. Cadence has already introduced several Tensilica ConnX DSPs—and you can expect that we will continue enhancing them to meet the computational requirements in the years ahead.